- Objektverfolgung für die Kameramodelle IN-9420 2K+ und IN-9820 4K
- Wenn PIR und Bereiche nicht gekoppelt sind, werden Alarmbereiche (sofern vorhanden)
weiterhin für die Objekterkennung herangezogen, sodass sich ein Objekt mit einem der
Alarmbereiche überschneiden muss
- Austausch des KI-Modells für eine schnellere und präzisere Objekterkennung
- Problem behoben, damit die Vorlaufzeit bei einem Alarm korrekt berücksichtigt wird
- Verbesserung beim Wiederaufbau des Live-Videos innerhalb der Weboberfläche
- Speichern der digitalen Zoomstufe für Kameras ohne optischen Zoom
- Fehler behoben der die Host Verifizierung beim Nutzen des sFTP Dienstes verhindert hat
- Erweiterung der max. möglichen Videoabgriffe auf 6 (zuvor 3)
- Ein manueller Snapshot (Bild) wird wieder korrekt in der höchsten Auflösung erstellt
- Problem behoben, durch das die Privatsphäre-Bereiche in manchen Situationen nicht
mehr veränderbar waren
- Intervall für Bilder auf der SD-Karte bei Alarm kann nun feiner angepasst werden
- Problem behoben, das verursachen konnte, dass der Autofokus bei IN-9X20-Modellen
unterbrochen wurde
- Allgemeine Fehlerbehebungen und Leistungsverbesserungen
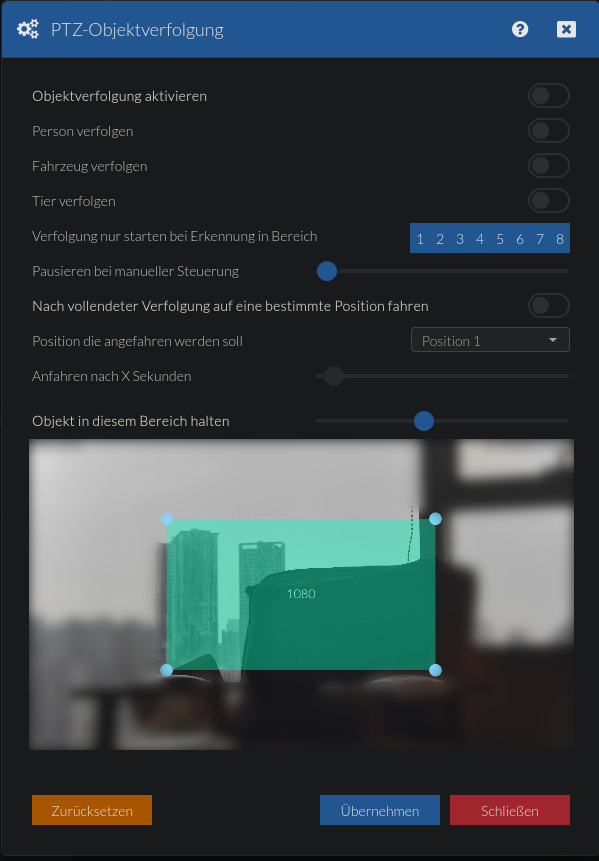
trackperson: Verfolgung für bewegte Objekte der Klasse „Person“ aktivieren [0,1]
trackvehicle: Verfolgung für bewegte Objekte der Klasse „Fahrzeug“ aktivieren [0,1]
trackanimal: Tracking für bewegte Objekte der Klasse „Tier“ aktivieren [0,1]
linkareas: Objekt-Tracking nur starten, wenn sich das Objekt in einem verknüpften Alarmbereich bewegt
centerwidth: Das verfolgte Objekt innerhalb dieser mittleren Zone halten [200 – max. Bildbreite]
centerheight: Das verfolgte Objekt innerhalb dieser mittleren Zone halten [200 – max. Bildhöhe]
manualpause: Unterbricht die Verfolgung, wenn ein manueller PTZ-Befehl empfangen wird, für Sekunden [1-900]
moveback: Kehrt nach Verlust der Verfolgung zur Ausgangsposition zurück [0,1]
backpos: Ausgangsposition 0, um zum Startpunkt der Verfolgung zurückzukehren, oder 1-8 für voreingestellte Positionen [0-8]
keepafterstop: Ignoriert potenzielle neue Objekte für einen Zeitraum in Sekunden, nachdem das verfolgte Objekt verloren gegangen ist. Mit dieser Einstellung können Sie beispielsweise Objekte weiter verfolgen, die sich eine Weile lang nicht mehr bewegen.
backinterval: Rückkehr zur Ausgangsposition nach Sekunden [1-900]
predict: Vorhersage der Position eines Objekts am Ende der Kamerabewegung in Richtung des Objekts, anstatt die Kamera direkt zur letzten bekannten Position des Objekts zu bewegen. Die Vorhersage kann fehlschlagen, wenn die Bewegung des Objekts unregelmäßig ist [0,1]
Offenbar gibt es tatsächlich ein Problem mit der Rückkehr zur gewünschten Person nach beendeter Objektverfolgung. Die Kamera bleibt dabei einfach in der letzten Position des Objektes und lässt sich in manchen Fällen danach auch nicht mehr zurück fahren. Weder per App, noch per MQTT. Die App gibt dabei immer die Meldung aus: PTZ ist beschäftigt. Nur ein Systemneustart hilft anschließend.
Details:
Kamera ist sowohl per MQTT in Home Assistant eingebunden als auch per HomeKit Secure Video.
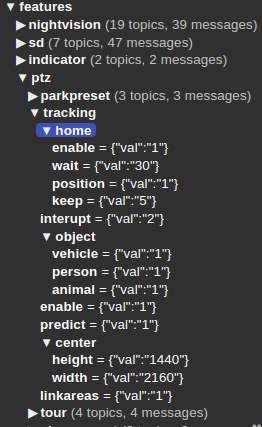
Es gibt dabei 2 Wartezeiten - einmal versucht die Kamera das Objekt wiederzufinden und wenn dieses Intervall abgelaufen ist, verbleibt sie noch eine Zeit auf der letzten Position. Was ist bei diesen beiden Intervallen hinterlegt auf der Kamera? Man kann dies mit dem folgenden Befehl auslesen:
Hallo ich besitze eine IN-9408 2K W-LAN & IN-9408 2K PoE & IN-9420 2K
Dank der IN-9420 2K kann ich die anderen beiden einsehen.
Dadurch ist mir aufgefallen dass die Infrarot LED Helligkeit sich nur von 1% bis 40% verändert und von 40% bis 100% nichts passiert.
Bei der IN-9420 2K habe eine Parkposition Gespeichert die automatisch nach 60 Sekunden angefahren werden soll.
Beim ersten mal verstellen der Cam fährt sie zurück zur Parkposition so wie es soll.
Beim zweiten mal verstellen fährt sie nicht zur Parkposition zurück Überhaupt funktioniert das anfahren einer Position nicht mehr.
Same for me: after the upgrade, if I manually move the camera to a different view area, it no longer automatically returns to the parking position after 60 seconds.
Aber das ist die Parkposition, die man unter Features/PTZ einstellt? Und nicht die Position, die die Kamera nach dem Tracking einnehmen soll, wie im Objektverfolgungs-Menü eingestellt?
The same here - the issue is with the parking position and NOT with the idle position your camera should return to after it lost track of the object, correct?
D.h. der hier beschriebene Fehler betrifft nicht die Objektverfolgung?
Bzgl. der Objektverfolgung gibt es aktuell einen (Anzeige-) Fehler. Die Ruheposition liegt standardmäßig auf der „Ausgangsposition“ - also der Position auf der sich die Kamera befand bevor sie anfing das Objekt zu verfolgen. Die WebUI zeigt jedoch die gespeicherte Position 1 als Standard an. Wenn man hier die gewünschte Position auswählt und nochmal auf speichern klickt, wird die Position jedoch korrekt überschrieben.
After tracking object (in my case only: person) the cam come back correctly to Position 1, that I save in the menù tracking object as “position 1”.
The problem is when I move the cam manually to an another Position for example n.2, the cam should be come back to Park Position 1 (the same position for the tracking menù) after 60 sec, but it remains stationary at position 2.
Die Wartezeit steht auf 60 Sekunden (Standard) und die andere Zeit (manuelles bewegen) habe ich mal auf 1 Sekunde gestellt. Sollte aber für mein Verständnis keine Rolle spielen (?)
Das Problem tritt immer wieder auf. Er fährt meist zurück nach der Wartezeit, jedoch weicht die Position immer von der genauen einprogrammierten ab. Als würde er nur „ungefähr“ dahin fahren.
Desweiteren hat die Kamera aktuell leider Probleme die Person zuverlässig zu verfolgen. Die Kamera hängt bei mir montiert auf einer Hauswandecke und hat eine ungefähre Höhe von 3m. Die Verfolgung klappt meinst nur bis zur Ecke. Dann verliert die Kamera die Person, welche um die 90 grad Ecke geht. Hier hoffe ich auf Besserung mit weiteren Updates
Die Ruhe-Position bei der Objektverfolgung hatte mit diesem Update die Parkposition ersetzt. D.h. wenn man ersteres nutzte war die andere deaktiviert. Da es aber offensichtlich gute Gründe gibt beide Funktionen aktiv zu haben, wird es bald ein Update geben, dass dies ermöglicht.
Die Topics hatten es nicht mehr in den Release geschafft. Wird mit dem nächsten Update dann nachgebessert.
See above The park position was replaced by the object tracking idle position - there will be a fix soon that will allow you to set both.
Die Genauigkeit sollte eigentlich kein Problem sein. Sicher das es nicht nur das Anzeige-Problem in der UI ist? Hier wird standardmässig die Position 1 als ausgewählt angezeigt. Intern ist aber die „Ausgangsposition“ gespeichert. Man muss hier die Auswahl einmal manuell treffen und speichern, um die Standardeinstellung zu überschreiben.
Das aktuelle Modell - dieses wurde speziell für die Objektverfolgung ausgetauscht - ist eigentlich schon einiges besser als das vorher genutzte. Am besten mal ein Video aufzeichnen, bei dem zu sehen ist, wann die Kamera das Objekt verliert. Der Support könnte dann einmal schauen, ob das Modell generell in der Lage sein sollte das Objekt wiederzufinden oder nicht.
Ist es geplant bei Objekterkennung neben der Verfolgung auch ein Automatischer Zoom auf das Objekt zu integrieren, oder ist der Zoom und Auto-Fokus dazu zu langsam.
Vorrausgesetzt das Objekt ist nah genug, um gut erkennbar zu sein - dann ist es umso wahrscheinlicher, dass man das Objekt verliert, je näher man die Kamera reingezoomt hat. Dann kommt hinzu, dass sich das Objekt ändert beim Zoomen - man erkennt mehr oder weniger Details. Die Kamera versucht immer das gleiche Objekt zu verfolgen - also auch wenn zwei Personen im Bild sind, wird immer die erste verfolgt. Dies erfolgt über eine Bestimmung der Ähnlichkeit des Objektes zwischen zwei Bildern (Frames). D.h. selbst wenn der Autofokus ohne Verzögerung scharfstellen würde, müsste man in einer extrem hohen Rate Frames abgreifen, um während des Zooms nicht zuviel Änderung ins Objekt zu bekommen und das Objekt zu verlieren. Das der Autofokus dann auch noch eine Weile braucht, um das Bild scharfzustellen, ist dann nur noch ein weiterer Faktor, der das ganze erschwert.
Kameras, die Objektverfolgung mit Auto-Zoom anbieten, arbeiten daher - meines Wissens nach alle - mit einem digitalen Zoom. Sprich man wählt eine Kamera mit einem Sensor mit ausreichender Auflösung und schneidet dann einfach auf den Bereich ins Bild rein, an dem sich das Objekt befindet.
Bzgl. schnellem Zoom/Scharfstellen darf man natürlich nicht auf die Objektive von Fotokameras schauen, die mit eingebauten Motoren und etlichen Linsengruppen etwa ab 700€ aufwärts kosten.
Die Problematik ist in meinem Fall die Erkennung der Objekte.
Diese ist so schlecht, das z.B. bei Katzen/Füchsen/Hunden die Objekte sehr schnell nicht mehr als solche erkannt werden und die Verfolgung somit abbricht.
Dabei ist auch egal, wie ich die Alarmbereiche einstelle, denn dass ich das immer wieder teste, sollte hinlänglich bekannt sein.
Da ich, wie bereits des Öfteren erwähnt, den Vergleich mit frigate habe, liegt es imho an der Software, die bei frigate durch die immense Hardware- Unterstützung ( in meinem Fall 2 Coral USB Edge TPUs für 7 Cams auf einem Intel MiniPC ) allerdings natürlich nicht vergleichbar ist.
Diese Ausgangsposition muss man sich eben immer vor Augen halten.
P.S. Ist es möglich, die Position bei der Objektverfolgung zu begrenzen?
In meinem Fall fährt die Kamera in 2 Positionen zu weit nach rechts bzw. links, so daß nachts meine Schiefer bei eingeschaltetem Flutlicht ( bei Infrarot sollte der Effekt ebenso auftreten ) die Kamera “blenden”.
Aktuell ist das nur indirekt drinnen - über den Bereich den man einzeichnen kann, in dem das Objekt gehalten werden soll. Die Kamera zieht immer erst nach, wenn das Objekt sich dem Rand dieses Bereiches nähert. D.h. wenn man diesen Bereich gross aufzieht, wird die Kamera weniger Schritte machen und bereits früher aufhören dem Objekt zu folgen - da es länger in der vorgegeben Box verbleibt.
- Problem behoben, wodurch die Kamera IN-9X20 bei aktivierter Objektverfolgung
nicht mehr in die Parkposition gefahren ist
- Anzeigefehler in der Dropdown-Auswahl behoben, durch den eine falsche
Rückkehrposition der Objektverfolgung angezeigt wurde
- Problem behoben, wodurch bei aktivierter Privatsphäre und ausgeblendetem Kameranamen
nach dem Update auf 4.1.0 die Kamera nicht mehr gestartet ist
- Allgemeine Fehlerbehebungen und Leistungsverbesserungen